
The Sopwith gearbox is truly a delight to behold: it is a piece of precision machinery of considerable complexity, beautifully detailed and executed.
Its design however leaves room for improvement...
First, second and third gears are engaged by the ("crash") meshing of gear teeth whilst revolving on separate shafts. Fourth gear is engaged by the more civilised meshing of dogs, revolving on the same shaft.
However, these top-gear dogs (now more than 100 years old!) are apt to be worn, and thereby prone to pushing themselves out of mesh: this is the Gear Jumping of the Title.
The solution adopted by Les Taverner in his series of articles on Sopwith Restoration in the VMCC Journal (ref. pp 217/223 of May 1989) was simply to latch the gear lever...
A proper cure however is less trivial.
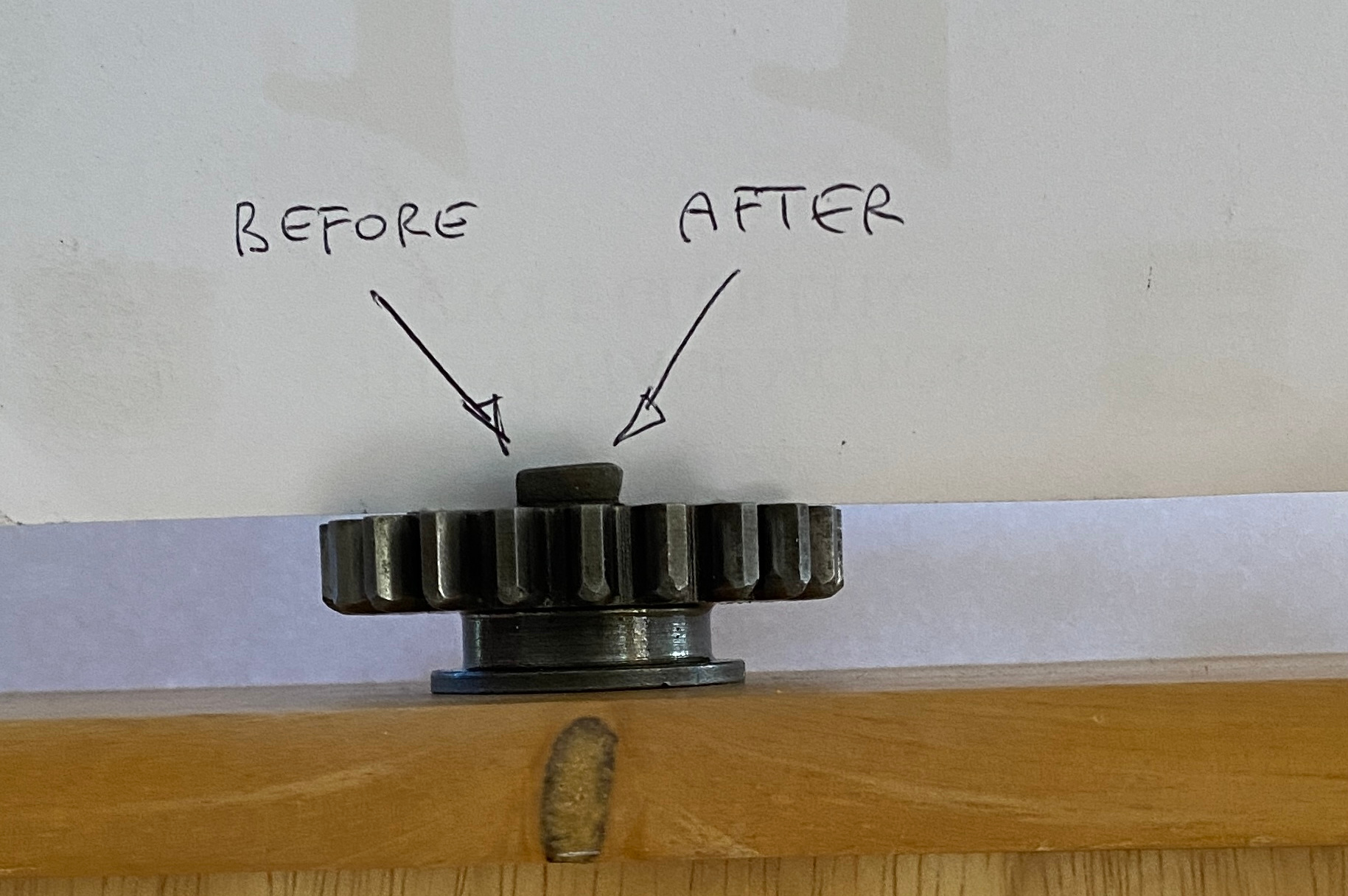
There are five rather stumpy dogs on each engagement face, on a mean pcd of about 34 mm., with an axial length of about 4.5 mm. I have found no evidence that the dogs were ever undercut ("dovetailed"), which is elsewhere common practice, to about 3*, thus persuading the dogs, once engaged, to hang together.
Increasing the axial length of the dogs would not be easy, and the improvement could be doubtful. Undercutting is the way to go!
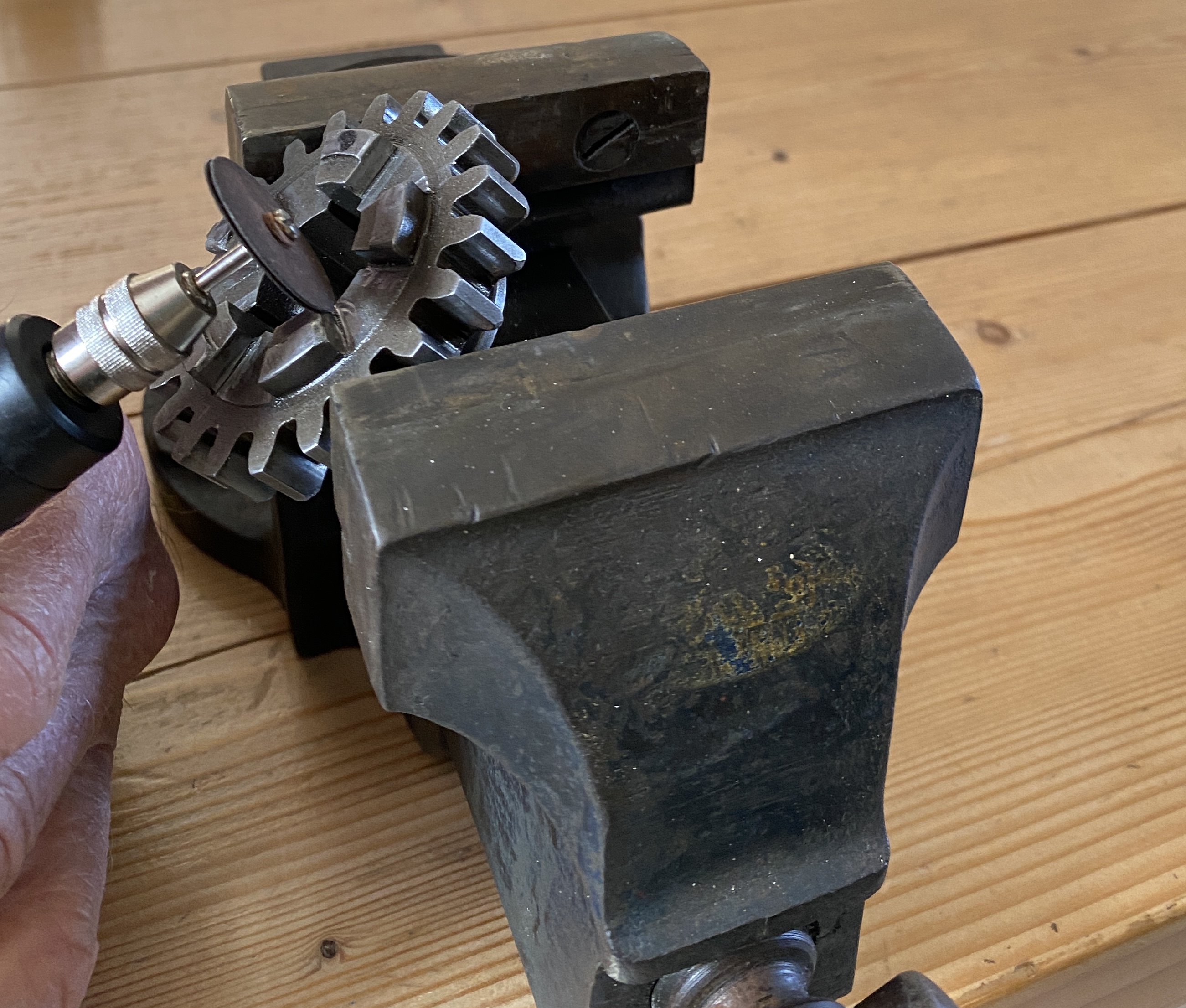
This process would preferably involve the use of a suitable tool-grinder, not a thing to which most people have access. However, a hand-held Dremel, equipped with a mini abrasive disc, is capable of doing a satisfactory job. It takes time, and a steady hand, to undercut all 20 dog-faces. Note that one isn't generating new geometry but only modifying existing geometry.
After that is the matter of securing full-depth dog engagement.
The sprung-peg gear-detent system would be difficult to modify, so adjustment, if necessary, should come from cutting back the selector fork's end that abuts the integral flange on its control shaft.
Gear-changing will still require double-declutching to guarantee silent engagement when shifting 4th to 3rd to 2nd to 1st, but at least 4th should present no more problems!
